自然界中,動物的行走、呼吸等節律性運動往往流暢而協調,這些動作的完成并不完全依賴大腦的即時指令。科學家發現,這一能力源于神經系統中的“中樞模式發生器”(CPG),它是一個由神經元構成的小型網絡,能夠自主產生有節奏的電信號,驅動肌肉完成周期性動作。CPG不僅存在于生物體內,也為機器人運動控制提供了重要靈感。
傳統四足機器人運動控制多依賴簡單的四神經元CPG架構,但這類設計存在明顯局限:步態類型單一,通常僅能實現三種左右的基本步態,遠不及自然界中四足動物的六種主要步態;同時,對單條腿內多個關節的協調控制能力不足,無法同時精準控制髖關節和膝關節的運動。針對這些問題,浙江大學曲紹興研究團隊提出了一種基于對稱性原則的新型八神經元CPG網絡,為四足機器人運動控制開辟了新路徑。
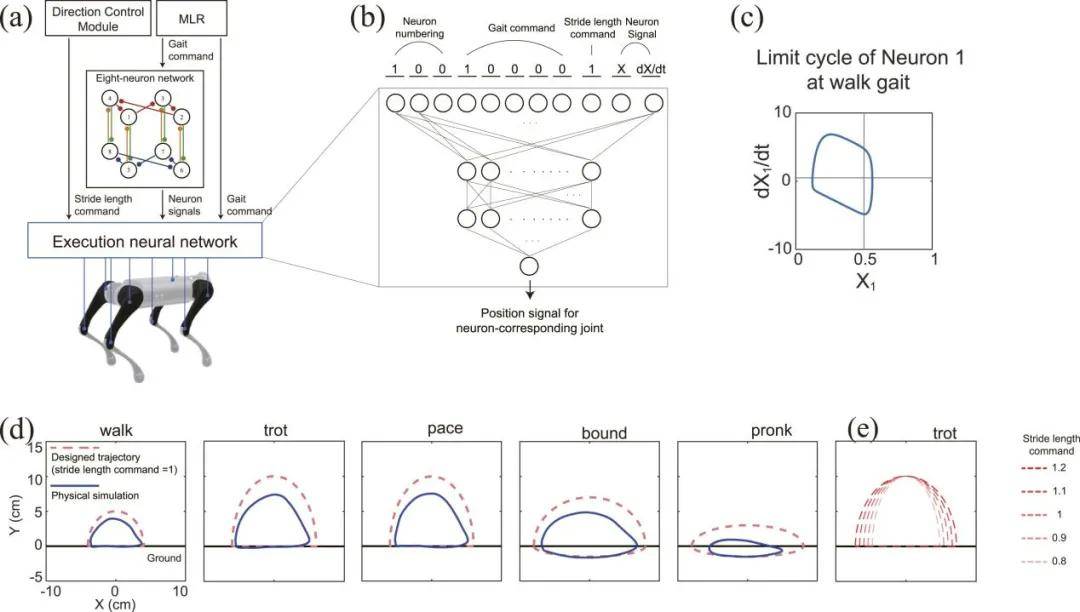
研究團隊從數學對稱性理論出發,發現CPG的步態生成能力主要取決于神經元連接網絡的對稱性結構,而非單個神經元的數學模型。他們首先驗證了四神經元網絡具備產生五種步態的理論潛力,包括行走、小跑、溜步、跳跑和騰躍。然而,這一網絡在面對單腿多關節協調控制時仍顯不足。為此,團隊創新性地將控制單條腿的“抽象”神經元拆分為兩個具體神經元,分別控制髖關節和膝關節,并通過局部對稱性連接形成小單元。最終構建的八神經元CPG網絡,既保留了全局對稱性以協調腿間運動,又引入了局部對稱性以實現單腿關節的獨立控制。
這一網絡結構可類比為立方體:頂層四個神經元控制四條腿的髖關節,底層四個神經元控制膝關節。通過這種設計,每個關節都獲得了專屬的節律控制單元,大幅提升了機器人的運動協調能力。在數值仿真中,該網絡成功穩定產生了五種步態,驗證了其基礎功能的有效性。
步態的穩定切換是高性能CPG的核心挑戰。五種步態意味著存在二十種可能的轉換路徑,其中許多轉換極易失敗。研究團隊通過深入分析轉換過程,歸納出四種高效策略:直接切換,通過調整核心參數實現簡單步態間的快速轉換;強力配對,對特定神經元施加短暫強刺激以穩定目標步態;等待-切換,延遲切換直至最佳時機以確保成功率;等待-強力配對,結合前兩者優勢處理復雜轉換。這些策略利用了神經動力學系統的分岔特性,確保了關節控制信號的連續平滑,避免了運動突變。
為驗證理論效果,研究團隊在物理仿真環境中使用商用四足機器人模型(Unitree Go1)進行了全面測試。測試架構包含調節模塊、中腦運動區和CPG網絡。結果顯示,機器人不僅能穩定實現五種步態,步態轉換成功率也極高:行走、小跑和溜步間的轉換成功率接近100%,涉及跳跑和騰躍的復雜轉換成功率也優于多數現有方案。轉換過程中,機器人身體姿態、運動速度和重心高度變化微小且平滑,展現了優異的穩定性和適應性。
團隊還設計了兩種傳感器融合控制框架,進一步提升了機器人的環境適應能力。第一種框架通過頭部攝像頭識別地面路徑標記,結合模糊控制器調整步幅實現自主轉向和路徑跟蹤;第二種框架在髖關節處模擬扭矩傳感器,當機器人走上斜坡時,關節扭矩增大觸發反射回路,CPG自動將步態從小跑切換為更穩定的行走,回到平地后再切換回小跑。這些設計體現了感知-動作閉環的思想,顯著增強了機器人的自主性。
這項研究通過對稱性原則構建的八神經元CPG網絡,不僅增加了四足機器人的步態多樣性,還解決了單腿多關節協調控制難題。結合多種步態切換策略和傳感器融合框架,機器人在仿真測試中展現出了接近生物水平的適應性和穩定性。目前,研究團隊正將這一技術拓展至人形機器人運動控制,探索其在多自由度、高動態步態生成與切換中的潛力,為具身智能研究和復雜環境下的機器人自主運動提供了新方案。