通用機器人領域的先鋒企業傅利葉,在近日震撼發布了其傾力打造的開源人形機器人——Fourier N1。這一里程碑式的發布,不僅標志著傅利葉“Nexus 開源生態矩陣”戰略的首個實體項目落地,更為全球的機器人開發者及具身智能探索者提供了一個開放協作的創新平臺。
Fourier N1,作為“Nexus-01”的具象化呈現,其設計初衷便是為了推動高泛用性運動控制、多模態模型融合以及未來具身智能載體形態的深入研究與驗證。傅利葉此番大方地分享了包含物料清單、設計圖紙、裝配教程以及基礎操作軟件在內的全面資源包,無疑為全球的技術愛好者打開了一扇通往未來的大門。
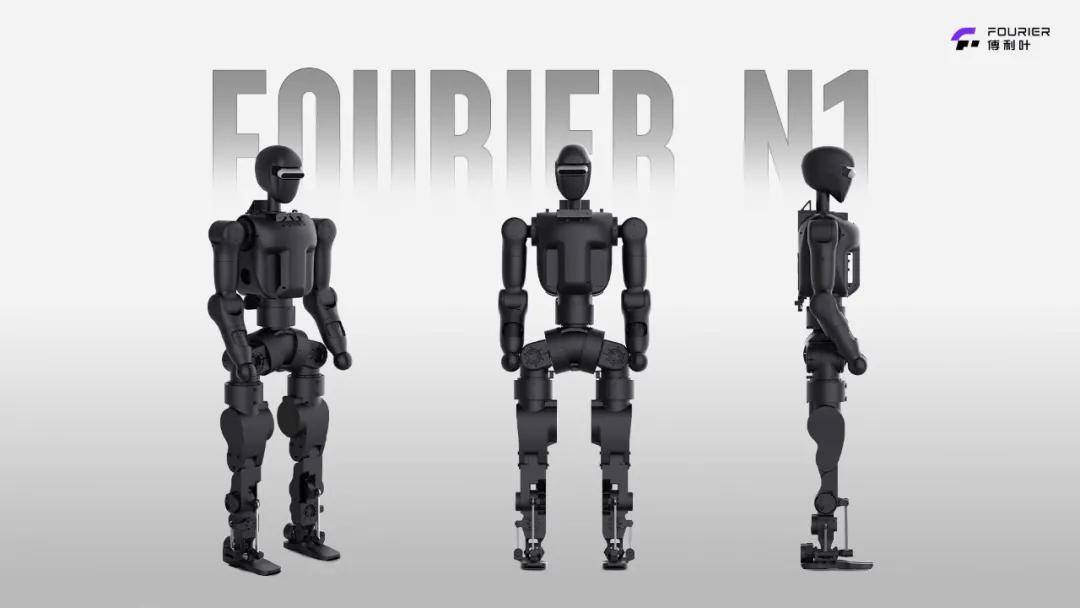
Fourier N1在設計上采用了緊湊高效的硬件架構,身高設定為便于互動的1.3米,體重控制在38公斤,全身共計23個自由度,確保了靈活性與實用性的完美結合。其機身由鋁合金與工程塑料精心打造,既保證了結構強度,又兼顧了關節的靈活性。背部插拔式的電池設計,使得單次連續運動續航時間超過2小時,極大滿足了高頻測試與快速部署的需求。
動力系統方面,Fourier N1搭載了傅利葉自主研發的FSA 2.0一體化執行器,配合定制控制系統,實現了運動穩定性、抗沖擊能力與高精度位姿控制的顯著提升。經過嚴格測試,該機器人最高穩定奔跑速度可達3.5米/秒,展現了卓越的運動性能。
為了讓更多開發者能夠輕松上手,傅利葉提供了詳盡的開源物料。硬件制造體系涵蓋了完整的物料清單(BOM)、可直接加工的結構圖紙以及詳細的裝配指南與操作演示視頻。基礎控制系統則包括了已開放在GitHub上的基礎操作軟件代碼、通訊接口封裝等關鍵資源。所有相關的BOM清單、整機STEP文件、整機圖紙(SolidWorks格式)以及裝機SOP,均可通過訪問特定網址https://fourier-grx-n1.github.io/獲取。
傅利葉的這一舉措,無疑為全球的機器人開發者搭建了一個極具價值的開源平臺,不僅促進了技術的交流與共享,更為推動機器人技術的創新發展注入了強大的動力。