在自動化制造領域,多個機械臂如何在充滿障礙物的共享空間中高效協作、避免碰撞,一直是困擾業界的難題。如今,一項發表于《科學·機器人學》(Science Robotics)的新研究,為這一難題提供了創新解決方案——由DeepMind、Intrinsic AI和倫敦大學學院等機構聯合開發的“機器芭蕾”(RoboBallet)系統,通過將圖神經網絡(GNN)與強化學習結合,實現了多機械臂的協同運動規劃。
研究團隊介紹,傳統方法在處理多機器人任務分配、調度和運動規劃時,需分別解決三個子問題:任務分配需決定“誰做哪項任務”;任務調度需確定“任務執行順序”;運動規劃則需在關節空間中尋找無碰撞路徑。這三個問題相互交織,導致計算復雜度呈指數級增長,工業界目前仍依賴人工規劃,效率低下且成本高昂。
RoboBallet的創新之處在于,它將整個場景建模為圖結構:機器人、任務和障礙物作為節點,節點間的關系(如相對位置)作為邊。例如,機器人節點間存在雙向邊以支持避碰協調,任務和障礙物節點到機器人節點則存在單向邊,用于傳遞環境信息。這種圖結構表示,使系統能夠動態適應不同數量的機器人和任務。
在算法層面,RoboBallet采用圖神經網絡作為策略網絡,通過權重共享處理不同規模的圖輸入。系統以觀測圖為輸入,在每個時間步為所有機械臂生成關節速度指令,使其僅憑原始狀態輸入即可完成關系推理。為解決稀疏獎勵問題,研究團隊引入了“事后經驗回放”(Hindsight Experience Replay)方法,使模型無需人工設計獎勵函數即可高效學習。
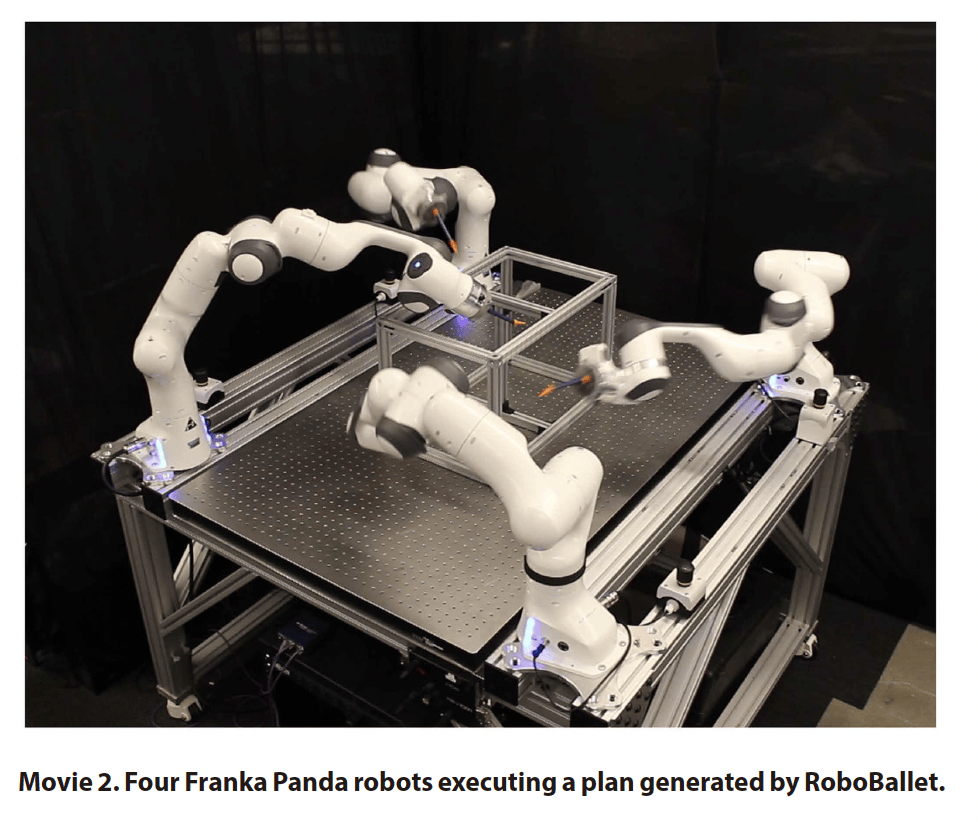
實驗中,研究團隊在模擬環境中部署了4至8個Franka Panda七自由度機械臂,測試場景包含40個任務和30個障礙物。與經典RRT-Connect算法對比顯示,RoboBallet在多個關鍵指標上表現優異:在訓練擴展性方面,任務數量增加四倍時,收斂所需訓練步數僅略有增加;在規劃速度上,8個機械臂和40個任務的最大場景中,每個規劃步在NVIDIA A100 GPU上僅需0.3毫秒,在單核CPU上約需30毫秒,均遠超實時需求;在協同效率上,機器人數量從4個增至8個時,平均執行時間減少約60%。
更引人注目的是,RoboBallet展現了強大的零樣本泛化能力。模型在隨機生成的環境中訓練后,可直接遷移至具有不同機器人位置、障礙物形狀和任務姿態的新環境,無需額外訓練。這種特性使其能夠應用于工作單元布局優化(任務執行時間縮短33%)、容錯規劃和基于在線感知的重新規劃等場景。
研究團隊指出,RoboBallet的高速和可擴展性,為自動化制造提供了新的技術路徑。其每步0.3毫秒的規劃速度,足以支持10Hz時間步下的實時控制,而單GPU即可完成所有計算,顯著降低了部署成本。未來,這一技術有望進一步推動智能制造的發展。